




Especificaciones del sistema
Nombre del producto
Zenmuse L3
Precisión del sistema de nube de puntos
A 120 m de altitud de vuelo:
Precisión vertical: 3 cm (RMSE)
Precisión horizontal: 4 cm (RMSE)
A 300 m de altitud de vuelo:
Precisión vertical: 5 cm (RMSE)
Precisión horizontal: 7.5 cm (RMSE)
Medido en las siguientes condiciones en un entorno de laboratorio de DJI:
1. El campo contenía objetos con características angulares evidentes. DJI Matrice 400 se conectó a una estación multifunción D-RTK 3 calibrada en posición. La ruta de vuelo se planificó utilizando la función de ruta de área de DJI Pilot 2 (con la calibración de IMU activada) y escaneo lineal. La velocidad de vuelo se fijó en 15 m/s, la inclinación del estabilizador en −90° y cada segmento recto de la ruta de vuelo fue menor de 3300 m.
2. Uso de puntos de control en terreno duro expuesto que cumplen con el modelo de reflexión difusa.
3. Se usó DJI Terra para realizar el posprocesamiento con la función Optimizar precisión de nube de puntos activada.
Grosor de la nube de puntos
1.2 cm a 1σ (120 m de altitud de vuelo nadir)
2 cm a 1σ (300 m de altitud de vuelo nadir)
Medido en modo de escaneo lineal, utilizando puntos de control en objetos con una reflectividad del 80 %, sin optimización de la nube de puntos ni reducción del muestreo habilitadas en DJI Terra. Para 6σ, multiplica el grosor indicado por 6.
Campo de visión horizontal combinado (dos cámaras de cartografía RGB)
107°
Compuesto mediante la fusión de imágenes de dos cámaras con un ángulo de 45° entre sus ejes ópticos.
Distancia de muestreo en tierra RGB (GSD)
Valor promedio: 3 cm (300 m altitud de vuelo nadir)
Para obtener información sobre los métodos de cálculo detallados, consulta el manual de usuario disponible en la página de Descargas del sitio web oficial de DJI Zenmuse L3.
Peso
1.60 kg (sin un conector del estabilizador)
El conector del estabilizador Zenmuse L3 pesa 145 g.
Dimensiones
192 × 162 × 202 mm (la. × an. × al.)
Medido en el estado estabilizado predeterminado tras el encendido, con un diseño de estabilizador no ortogonal.
Potencia
64 W (típica)
100 W (máx.)
Aeronave compatible
DJI Matrice 400 (requiere el conector del estabilizador Zenmuse L3)
Índice de protección de entrada
IP54
Temperatura de funcionamiento
De −20 a 50 °C (de −4 a 122 °F)
Temperatura de almacenamiento
De −40 a 70 °C (de −40 a 158 °F)
Longitud de onda del láser
1535 nm
Divergencia del rayo láser
0.25 mrad (1/e²)
Tamaño del punto láser
Φ 41 mm a 120 m (1/e²)
Φ 86 mm a 300 m (1/e²)
Alcance de detección
700 m a una reflectividad del 10 % y 350 kHz
950 m a una reflectividad del 10 % y 100 kHz
2000 m a una reflectividad del 80 % y 100 kHz
1. Definición de rango: el rango se define como la distancia a la que se detecta el 50 % de los pulsos láser emitidos. Si un rayo láser alcanza a más de un objetivo, se divide la potencia total del transmisor del láser y se reduce el posible alcance.
2. Condiciones de prueba: luz ambiental de 100 klx, dentro del área central del FOV, utilizando un objetivo plano con un tamaño mayor que el diámetro del haz láser, un ángulo de incidencia perpendicular y una visibilidad atmosférica de 23 km.
3. El alcance máximo de detección es de 900 m por defecto. Para un alcance mayor, ponte en contacto con el servicio de asistencia de DJI o con un distribuidor autorizado.
Alcance de detección de cables
Cable trenzado de aluminio con núcleo de acero de 21.6 mm:
300 m a 100 klx, 350 kHz
Cable de PVC negro aislado de 18.4 mm:
100 m a 100 klx, 350 kHz
1. Definición de rango: la distancia a la que una sección de cable completamente escaneada en la cartografía alcanza una densidad de puntos de 4 puntos por metro.
2. Condiciones de prueba: luz ambiental de 100 klx, visibilidad atmosférica de 23 km, el FOV del centro del LiDAR perpendicular al cable, modo de escaneo no repetitivo, el dron vuela a lo largo del cable a 15 m/s y el cable está limpio y no envejecido.
Precisión de rango:
Precisión absoluta: ±10 mm
Repetibilidad: <5 mm (1σ)
Las especificaciones anteriores pueden cumplirse bajo condiciones de prueba de temperatura ambiente de 25 °C (77 °F), frecuencia de pulsos de 350 kHz, reflectividad del objeto del 80 % y distancias de 120 m y 300 m. El entorno real podría ser diferente al entorno de pruebas. El valor anterior se incluye únicamente como referencia.
Distancia mínima efectiva de detección
10 m
Frecuencia de emisión de pulsos láser
100 kHz, altura de vuelo recomendada <500 m
350 kHz, altura de vuelo recomendada <300 m
1000 kHz, altura de vuelo recomendada <100 m
2000 kHz, altura de vuelo recomendada <50 m
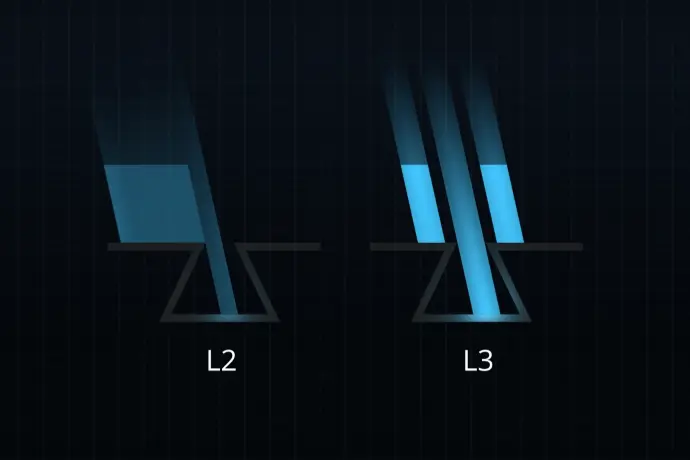
Número de retornos
4, 8, 16 retornos (100 kHz, 350 kHz)
4, 8 retornos (1000 kHz)
4 retornos (2000 kHz)
Cálculo de ciclo cruzado
7 veces
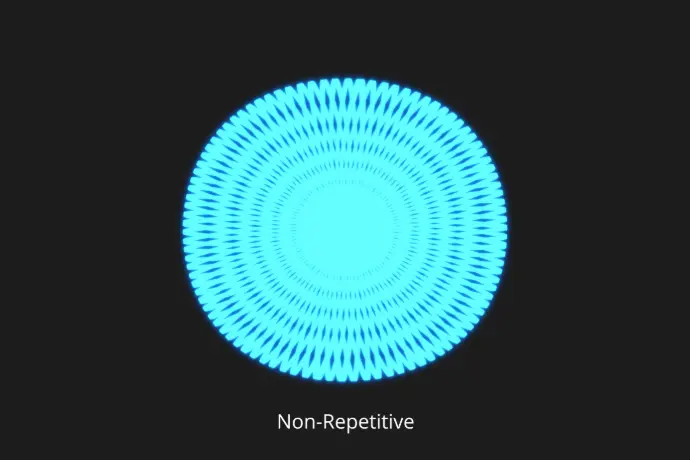
Modo de escaneo y FOV
Modo de escaneo lineal: horizontal 80°, vertical 3°
Modo de escaneo en estrella: horizontal 80°, vertical 80°
Modo de escaneo no repetitivo: horizontal 80°, vertical 80°
Clasificación de seguridad láser
Clase 1 (IEC 60825-1:2014)
Sensor
CMOS 4/3
Objetivo
Distancia focal equivalente: 28 mm
FOV: 73.3° (diagonal), 62° (horizontal), 41.2° (vertical)
Apertura: f/2.0-f/11
Obturador
Obturador mecánico: 2-1/1500 s (f/2.0), 2-1/2000 s (f/2.8-f/11)
Recuento del obturador: 500 000
Obturador electrónico: 2-1/16 000 s
Tamaño de fotografía
100 MP: 12 288 × 8192
25 MP: 6144 × 4096
Intervalo mínimo de foto
JPEG:
25 MP: 0.5 s
100 MP: 1 s
RAW o JPEG + RAW:
1.2 s
Especificaciones de vídeo
Formato de video: MP4 (MPEG-4 HEVC/H.265)
Resolución:
4K: 3840 × 2160 a 30 fps
FHD: 1920 × 1080 a 30 fps
Tasa de actualización GNSS
5 Hz
Tasa de actualización de POS
200 Hz
Error de posición
Ángulo de guiñada: 0.02° (posprocesado, 1σ)
Ángulo de inclinación/rotación: 0.01° (posprocesado, 1σ)
Precisión de posicionamiento
Precisión de posicionamiento horizontal: 1 cm + 1 ppm (RTK FIX)
Precisión de posicionamiento vertical: 1.5 cm + 1 ppm (RTK FIX)
Formatos de datos diferenciales PPK compatibles
DAT: generado en modo estación base por la estación multifunción D-RTK 3 y D-RTK 2
RINEX: v2.1x, v3.0x
RTCM: v3.0, v3.1, v3.2, v3.3 (protocolos: MSM3, MSM4, MSM5, MSM6, MSM7)
OEM: OEM4, OEM6
Para la operación en campo, asegúrate de que la distancia entre la estación multifunción y la aeronave no exceda los 15 km, y que la estación multifunción sea compatible con la observación por satélite con más de dos constelaciones GNSS.
Grados de libertad
3 ejes (inclinación, rotación, guiñada)
Precisión angular
±0.01°
Rango mecánico
Inclinación: −135° a +73°
Rotación: de −90° a +60°
Guiñada: de −105° a +105°
Límite estructural, rango no controlable.
Rango controlable
Inclinación: −120° a +60°
Guiñada: de −80° a +80°
La rotación es incontrolable, solo para estabilización.
Método de comprobación automática
Eje de rotación: no requiere comprobación automática
Eje de guiñada: comprobaciones mediante tope de límite
Eje de inclinación: no requiere comprobación automática
Método de montaje
DJI SKYPORT desmontable (Conector de estabilizador único Zenmuse L3)
Almacenamiento de datos en bruto
Archivos de fotos/IMU/Nube de puntos/GNSS/Calibración
Tarjeta de memoria estándar
Tarjeta de memoria CFexpress™ Tipo B, velocidad de escritura secuencial de 1500 MB/s
Lector de tarjetas estándar
Velocidad de lectura/escritura >900 MB/s
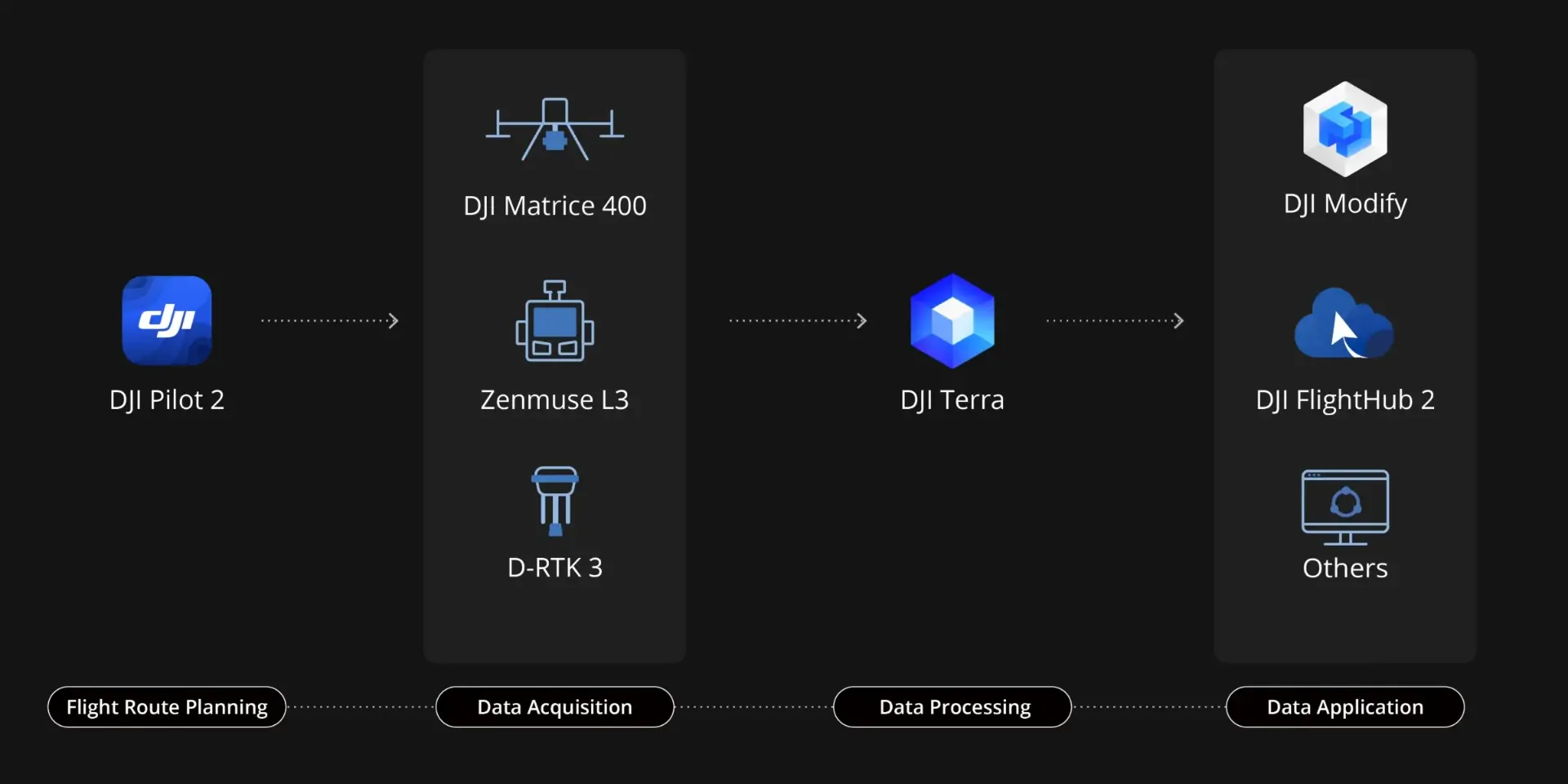
Recopilación de datos
DJI Pilot 2
Procesamiento de datos
DJI Terra
Aplicación de datos
DJI Modify
Aplicación en la nube
DJI FlightHub 2
Formato de datos
DJI Terra permite exportar modelos de nube de puntos en los siguientes formatos:
Formato estándar de nube de puntos: PNTS/LAS/LAZ/PLY/PCD/S3MB
DJI Modify permite importar modelos de nube de puntos en los siguientes formatos:
Formato estándar de nube de puntos: LAS
LiDAR
Cámara de cartografía RGB
Sistema de posicionamiento y orientación (POS)
Estabilizador
Almacenamiento de datos
Ecosistema de software